蘑菇车联目标分割算法排名全球第一 成功登顶自动驾驶算法排行榜
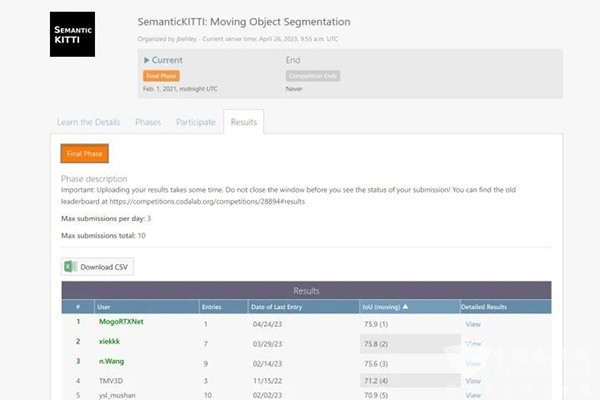
客车网2023年5月6日获悉,蘑菇车联运动目标分割算法近日登上KITTI 数据集Moving Object Segmentation任务榜单第一。该任务关键在于能够准确且快速地将激光雷达识别出来的点云图像中运动部分分割出来,比如行驶中的车辆、过马路的行人、地面爬行的小动物,甚至是一片飘落的树叶。
运动目标分割算法的难点是同时保证算法的准确性和实时性,蘑菇车联在这两项指标上都远超行业水平。研究团队利用不同视图信息互补的特性等方式来提高算法识别准确性,识别时间仅需15毫秒;为了保证算法框架的实时性,团队将点云序列叠帧部分做了深度优化,目前对于5帧点云(每帧15万个点)进行叠帧,耗时仅2.5 毫秒。
KITTI是目前国际上最大的自动驾驶场景下计算机视觉算法评测数据集,由德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合创办。同时,该数据集提供了算法打榜功能,网站汇集大量相关的论文算法和场景真实数据,对自动驾驶算法研发有重要指导意义,是全球顶级自动驾驶公司、研究机构的“竞技场”。
运动目标分割算法在自动驾驶中的应用广泛,它可以将运动的点云剔除掉,仅保留静止的点云,从而帮助SLAM(即时定位与建图)更好地估计车辆位姿变化和建图;该任务也可以将运动的点云聚类并输出给轨迹预测或轨迹决策规划模块,使得自动驾驶车及时地避让运动的物体。
蘑菇车联持续在数字交通前沿技术领域实现突破,相关研究成果涵盖目标分割、目标识别、目标跟踪、融合感知以及交通参与者轨迹预测等重要环节,全环节保证L4级自动驾驶系统Mogo AP的安全性。截至目前,蘑菇车联多项算法在国际权威数据集榜单中排名居于前列,包括KITTI、nuScenes等,研究成果被ICRA、IROS、IEEE等国际权威学术机构认可。
分享到:
阅读量:1508
互动咨询
相关报道





